|
Dohyeon Lee
I am an undergraduate student in the Department of IT Convergence Engineering at POSTECH in South Korea. |
|
Publications
Representative papers are highlighted. |
|
|
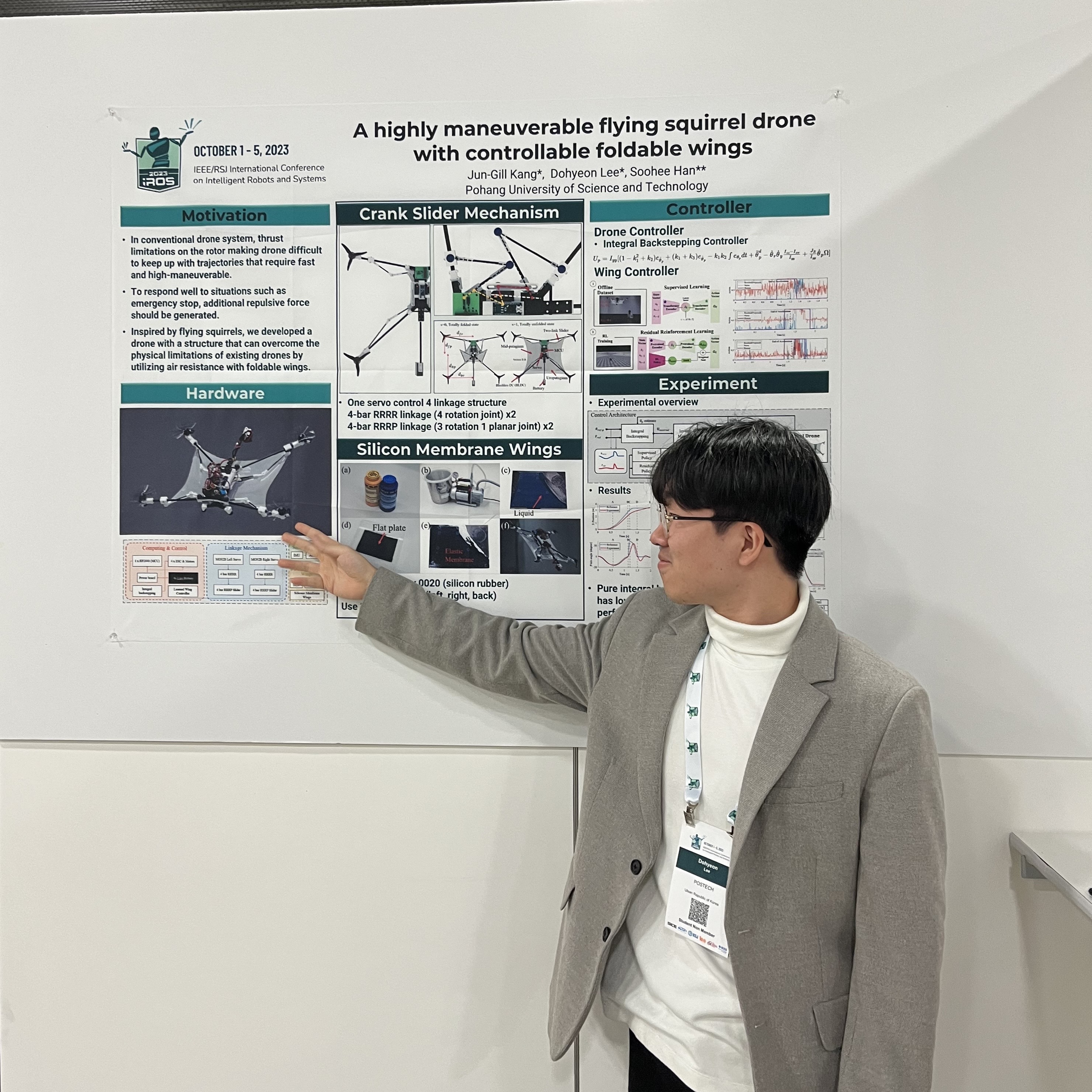
A Highly Maneuverable Flying Squirrel Drone with agility-improving Foldable Wings
Dohyeon Lee*, Jun-Gill Kang*, Soohee Han IEEE Robotics and Automation Letters (RA-L), 2025 project page / video / arxiv Develop general trajectory tracking controller of flying squirrel with learned wing dynamics. |
|
|
A Highly Maneuverable Flying Squirrel Drone with Controllable Foldable Wings
Jun-Gill Kang*, Dohyeon Lee*, Soohee Han IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023 project page / video / arxiv Build and control non-linear dynamics governed flying squirrel inspired quadrotor using reinforcement learning. |
|
|
|
Reachability-Aware MPPI for aggressive maneuvers
08.2025-Current
• Environment estimation from the sample history of MPPI. |
|
|
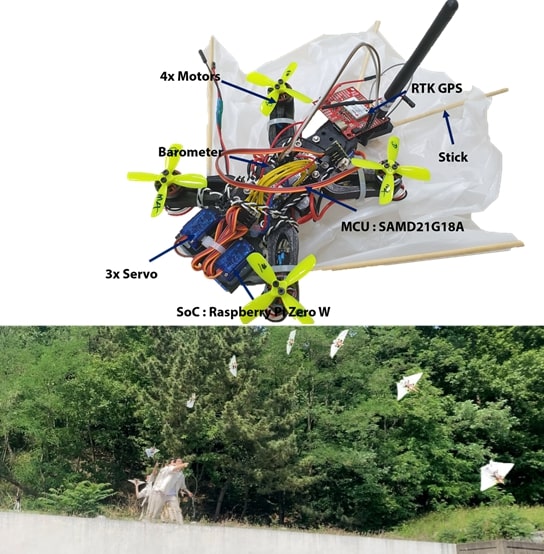
Development of highly maneuverable Flying Squirrel Drone
06.2022-06.2025 video
• Implement integral backstepping based Lyapunov stable controller for drone. |
|
|
Sloshing control with Physics-Informed RNN by 6-axis manipulator
08.2023 - 02.2024 Related achievement: 1st place, 2023 Undergraduate Group Research Program, POSTECH video
• Development of 6-axis manipulator hardware and stabilization of low-level control system. |
|
|
Whole-body control of quadrupedal robot with arm by off-policy RL
06.2023-08.2023 video
• implement off-policy (SAC) and on-policy (PPO) RL to a Legged-manipulator robot in the Isaac Gym. |
|
Development of Glidable Flying Squirrel Drone
02.2022-06.2022 video
• Develop Glidable drone with foldable wings. |
|
|
Quadruped-wheel robot control with impedance control
08.2021-01.2022 Related achievement: 1st place, 2021 Undergraduate Group Research Program, POSTECH video
• Development of quadruped-wheel robot hardware and stabilization of low-level control system. |

|
Development of self-driving platform using mecanum wheel and 2D lidar
11.2020-02.2021 Related achievement: 3rd place, 2021 ICT Convergence Project Contest, devicemart video
• Directly implement mapping and A* algorithms with Python. |
|
|
|